【48812】机器人毛病剖析和解决方法
来源:电能质量优化
发布时间:2024-06-22 23:14:57
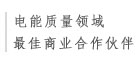
经过报警阐明和动作基本上能判别毛病为机器人的外部轴(第七轴)编码器这一路的问题,电机、线缆、SMB板都有或许
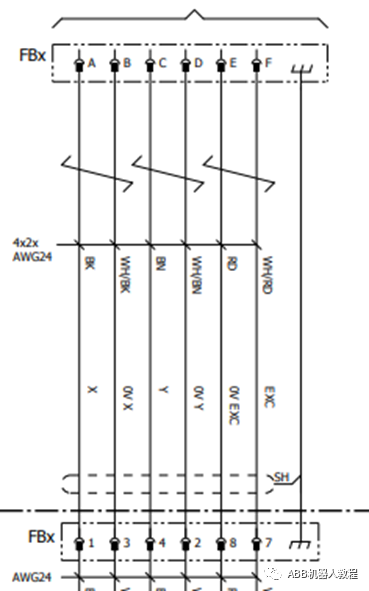
3.判别一下电机的编码器有没有损坏,用万用表量一下阻值,外轴电机(MU系列)编码器插头FB处,1和6电阻大约在200欧,2和7 电阻大约在200欧,3和8电阻大约在31欧;
4.替换SMB板,以IRB4600机器人为例,SMB板在机器人后边;
5.关于新机进行外部轴装备时,假如电机编码器线未插或硬件衔接与系统装备的外部轴丈量通道不一致也有此报警;
文章出处:【微信号:RoboticsMission,微信大众号:ABB机器人教程】欢迎增加重视!文章转载请注明出处。
开端有搭载摄像头的趋势,但对视觉的了解依然较低,往往需求有显着的特征点作为辅佐,一起抗干扰才能弱,对光照条件,部分遮挡等常见标题不能找到牢靠的
的差错进行了补偿,这种补偿仅仅针关于软件方面,并没有针对硬件方面做补偿。后续若条件答应,需求对补偿的成果进行
运行时进行这项作业是被严厉制止的,需按下列过程进行。①按下Cycle Stop开关,等候
中止;②拔下或装置送料器;③松开Cycle Stop按钮;④按下Start按键持续出产。(2)常见的送料器
伺服电机在很低的速度运行时,时快时慢,象匍匐 相同,怎么办? 伺服电机
在车辆车身点焊时,呈现了焊点全体偏移,其时正在出产的是第一辆车身没有介意,但后续
都是热插拔引起的,带电插拨装板卡及插头时用力不妥形成对接口、芯片等的损伤,然后导致
AMD Kria™ KR 260套件+ROS 2快速开发机器人解决方案