智能垃圾回收箱控制管理系统硬件设计-机智云
来源:电能质量优化
发布时间:2024-04-26 07:31:46
控制管理系统硬件部分的选型与设计是整个产品的基础,所有功能的实现都要围绕其进行开发。本章对智能垃圾回收箱控制系统的硬件进行详细设计。

智能垃圾回收箱运行时,通过扫描模块进行身份识别;身份验证后,控制器启动电机打开回收门,持续开启 7 秒;用户投放垃圾后,回收门自动关闭。超声波模块检测桶内垃圾容量,超过设定值时,控制器发出清理提示。垃圾进入回收箱后,系统称重记录并上传至云端,转换为积分存入用户账户,可用于兑换日用品。回收箱具备防火功能,烟雾传感器监测空气质量,高浓度烟雾时发出警报并启动灭火球。
智能垃圾回收箱传感器的最大的作用是实现系统的称重、防满溢、安全保护及防火等功能。
称重传感器是称重系统的核心部件,放置在箱体底部。其精准性和稳定能力是衡量它优劣的决定性因素。选择称重传感器时,要考虑其量程、精度以及输出形式。量程大小需要仔细考虑多方条件。

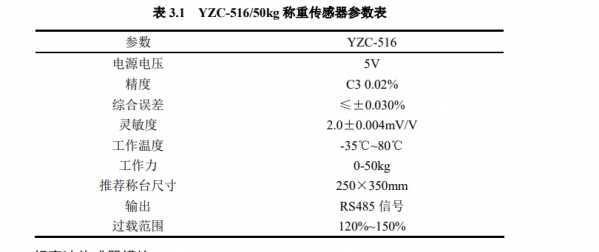
根据经验,称重传感器一般工作在 30%⁓70%量程范围内,若在使用时有较大冲击,称重需要扩大量程。本文设计的智能垃圾回收箱,主要回收物品为纸张、金属、塑料以及织物,使用的过程中不存在大的冲击,因此选用工作在量程范围 30%⁓70%的称重传感器即可满足规定的要求。考虑称重范围、安装环境和经济成本等条件,本文选用 YZC-516/50kg 传感器,详细参数见表。
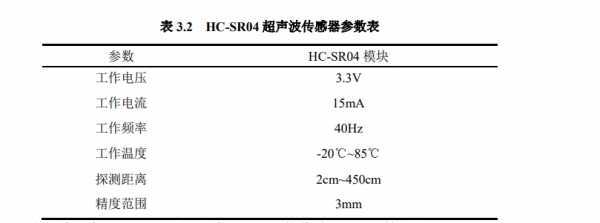
超声波传感器模块用于智能垃圾回收箱容量的检测。考虑到使用的方便性和检测的及时性,本文选用非接触式的超声波测距模块对桶内垃圾容量做测量。超声波具有高频率、短波长、方向性好的特点,工作时不受光线干扰,其抗干扰性和定位精度较强,在方便快捷的同时精度也能满足需求。经过调研,智能垃圾回收箱采用 HC-SR04 超声波传感器模块,详细规格参数如表所示
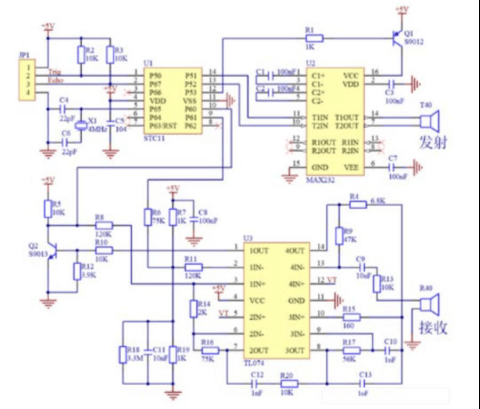
该传感器有 VCC、trig(控制端)、echo(接收端)、GND 等引脚(见图 3.3)。VCC和 GND 端口直接连接在电源正负极,控制端和接收端与处理器的 IO 端口相连。处理器通过控制口发出 10us 以上的高电平信号,发射端发射出超声波信号,遇到目标后反射回来,接受端接收到超声波信号后,发出低电平信号停止计时,读取定时器数值即为测距的时间,最后通过式(3.2)计算出传感器与目标物体的距离。

将超声波传感器安装在垃圾桶正上方,根据超声波传播时间计算得到智能垃圾回收箱顶部与垃圾的距离数据,用智能垃圾回收箱顶部到桶底的距离减去该数值即为垃圾桶的容量。为避免垃圾满溢,在设计时设置阀值,若传感器检验测试到垃圾桶容量超过该阀值,回收门无法启动,同时上传垃圾满溢信息提示工作人员清理垃圾桶,等到箱体内部清空后,智能垃圾回收箱投放功能再次开启。
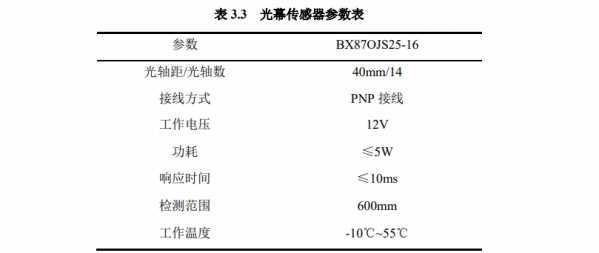
光幕传感器智能垃圾回收箱使用钢材制造,为防止用户投放垃圾时被投放门误伤,本文采用光幕传感器进行仔细的检测,避免发生安全事故。光幕传感器运用红外线扫描探测技术,让红外线在高速扫描情况下形成红外线光幕,当光幕被遮挡时,光幕传感器发出遮光信号,控制回收门停止工作,保证用户安全。本设计选用 BX87OJS25-16 安全光幕传感器,具体参数见表 。
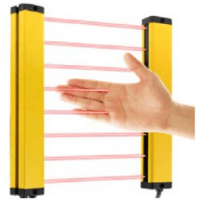
将光幕传感器固定在回收箱顶部,光幕的一边发射多条红外线,另一边接受红外线形成光幕,光幕传感器的输出通过控制器驱动回收门控制管理系统。如果红外线发射端和接收端中间无障碍,接收端在收到光信号后输出低电平,此时回收门控制管理系统正常运作;若用户将手伸入光幕内(如图 3.4),接收端收不到信号,内部电路输出高电平,此时正在关闭的回收门重新打开,从而保护用户的安全。
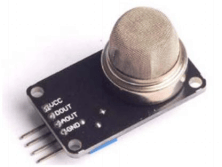
为了防止在密闭环境下发生火灾,智能垃圾回收箱中设计了 MQ-2 型烟雾传感器(如图 3.5 所示),该传感器属于表面离子式半导体,工作稳定、灵敏度较高、响应快,对于有刺激性非可燃性烟雾的干扰有着良好的抵抗性,被大范围的应用于消防系统。
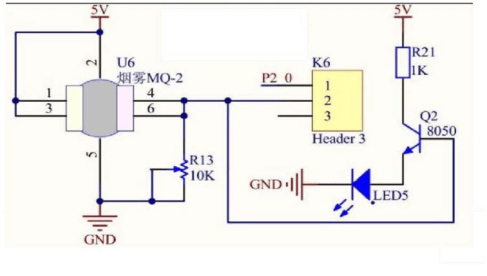
MQ-2 的电路图如图 3.6 所示,将其连接在 5V 电源上,当箱体内部产生烟雾时,传感器与其接触会引发表面导电率的变化,烟雾越浓导电率越大,输出的信号就越大。当烟雾浓度较高输出高于预定电压时,信号为低电平,LED 亮并报警,同时灭火球装置启动进行灭火处理。
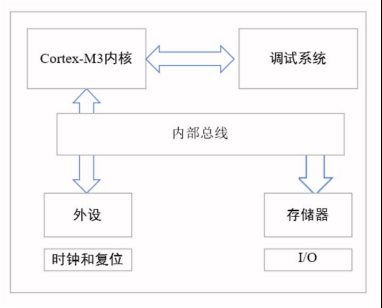
智能垃圾回收箱主控制器模块主控制器是整个硬件系统的核心,为了可以更好地实现产品功能,选用低功耗、高性能的控制芯片至关重要。目前市场上单片机类型繁多,在考虑 51 单片机、PLC、AVR 单片机以及 STM 单片机后,主控制器选用 STM32 单片机。STM32 单片机接口丰富,性能好、成本低,除了具有高度集成和易开发的优点外,其独有的 ARM Cortex-M[48]设计也使其能更稳定的工作。
另外,该款产品能调用芯片供应商所提供的固件库,快速缩短开发周期。在 STM32 系列单片机中,经考虑,主控制器采用 STM32F103ZET6 型号(如图 3.7),芯片采用 QFP 封装,工作电压在 2V 至 3.6V,属于 ARM Cortex-M3 系列,该款微处理器该芯片主频频率 72MHz,有 512Kb 的 FLASH 和高达 96Kb 的 SRAM空间;具有上电和断电复位,4-16MHz 的晶体振荡器;有着非常丰富的 IO 端口和片内外设,包含 2 个 I2C,3 个 12 位 ADC,4 个通用的 16 位定时器,2 个 PWM 定时器,含有 SDIO、SPI、USART、CAN 等通信接口,允许控制器以串行方式与各种**设备做通信。
(3)低能耗:为降低能耗,该芯片具有低功耗模式,允许控制器工作在睡眠、停机、待机三种状态[49];
(4)适应能力强:工作环境和温度在-40℃~+85℃或者-40℃~+105℃,这保证了它可以在寒冬酷暑的季节稳定工作,全部符合本设计所需要求;
基于以上优点,选用 STM32F103ZET6 作为核心控制器完全满足本设计所要实现的需求。3.4 智能垃圾回收箱显示器及扫描模块3.4.1 显示模块考虑到智能垃圾回收箱用户中老年人有一定占比,为帮助老年人更好地使用本产品,并考虑到让用户在阴暗环境下更好的操作本产品,采用触摸显示屏作为系统的显示模块。
目前市场中常见的显示屏主要有 LED、LCD、OLED 等三种显示屏,其中 LED显示屏因屏幕太大不在本设计考虑范围;LCD 使用液晶材料,功耗低、像素集成度高,被大范围的应用于电子设备;而 OLED 显示屏像素集成度高、更轻、响应更快,性能最好,但考虑到经济性,在不影响正常使用功能情况下选择 5 寸(800×480 像素)的 LCD电容式液晶屏作为显示器。STM32 控制器配置有 FSMC 总线可以直接连接 LCD,对LCD 显示屏进行管理。
用户可通过显示屏上的提示步骤,选择相应的回收门进行垃圾投放,投放结束后,显示屏上会显示本次投放垃圾的重量并提示用户本次操作结束。3.4.2 扫描模块为了可以快速验证客户身份,本文的设计采用“一户一码”方案,即每家用户通过二维码绑定身份,智能垃圾回收箱上配置一款合适的扫描头模块,在使用时扫描二维码即可。选用兴通 XT2003C 二维码扫描模块,可以读取各类介质的一维码、二维码,如纸质、标签、电子设备屏幕等。
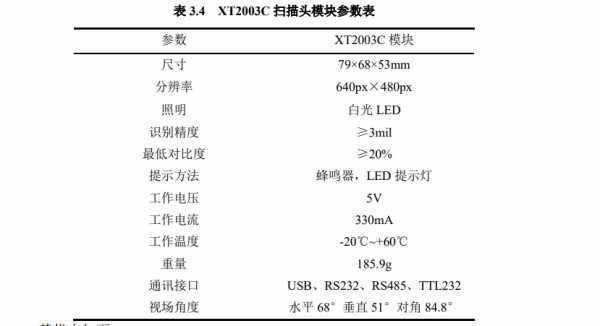
(2)简单易操作,扫描速度快,扫描精度高、扫描灵敏,大大的提高了用户使用体验;
(3)自带补光能力,保证产品在各种无光情况下也能正常使用,并能根据物品远近自动调节灯光亮度;
(4)接口丰富,包含 USB/TTL/RS232 等多种接口,适用于多种设备;
(6)全局曝光扫码速度快,采用 32 位 CPU,运算速度快,扫描灵敏度高;
(7)内置蜂鸣器,扫描时同步发声;这些优点使得其在各种条件下均能正常工作,用户只需出示二维码,系统通过扫描头进行身份的识别,验证成功后,即可进行垃圾投放,减少操作流程,节省用户时间。
语音模块语音模块与显示屏相互配合辅助用户更好的使用智能垃圾回收箱,本文设计的系统选用 DY-SV17F 模块实现语音播报功能。该模块在 5V 电压下工作,支持 IO 分段触发、UART 串口控制等多种工作模式,可以直接驱动 3⁓5W 的喇叭,也支持 UART串口控制语音播报。
STM32 控制器通过 GPIO 与该模块连接,通过 IO 触发的方式实现语音播报提示,辅助用户正确投放垃圾。3.5 智能垃圾回收箱通信模块通信模块的作用使得智能垃圾回收箱具有和云端进行信息交互的能力。对设备与云端的通信方式来进行了调研,主要方式有 WIFI 通信、GPRS 通信以及 4G DTU 通信。其中,WIFI 通信由于范围的局限性不予采用;GPRS 与 4G DTU 均采用移动网络进行长距离数据传输,但 4G DTU 的传输速度更快,兼容性更好,因此,本设计采用DTU 作为本系统的无线传输模块。
DTU,即数据传输单元,利用 4G 网络,将串口数据转为 IP 数据与远程服务器进行数据交互的设备。4G DTU 具有网络覆盖范围广、安全性能好、传输快的特点。其通信原理如图 3.8 所示,控制器对各类传感器进行数据采集,同时通过 DTU 模块将这一些数据信息进行转换并通过 4G 网络上传到服务器,实现设备与云端的通信。
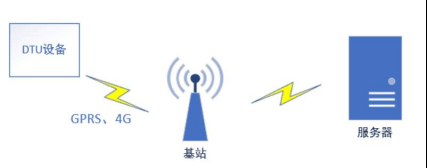
本文选取 DTU 的型号为 GR515,具体参数见表 3.5。该模块在工作时可以直接连接服务器传输数据。

摄像头与 DTU 模块通过网线进行连接,这种方式的优点是获取的监控信息可以直接上传到服务器,无需经过主控系统,节省开发时间。当使用现场出现一些明显的异常问题时,工作人能第一时间调用监控了解情况,防止意外。
智能垃圾回收箱的回收门采用自动化控制,回收门的自动工作原理如图 3.10 所示,当用户触发感应开关时,控制器下达开/关指令给驱动装置,驱动部分带动传动机构控制门的开关。
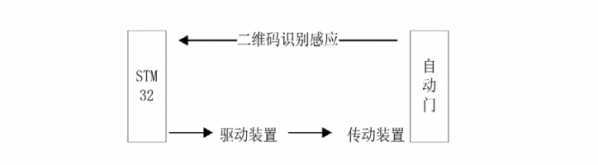
(1)当用户选择智能垃圾回收箱进行投放时,传动机构执行命令,电机正转,到达开门限位开关位置电机停止;(2)回收门开启等待 7 秒后开始关闭,电机反转,到达关门限位开关,电机停止;
(3)回收门开启时间内,如果有物品进出,系统将重新等待,直至 7 秒内无物品感应;回收门才再次关闭,确保用户人身安全;
(4)开关门过程中,电机速度从 0 开始加速到最高速度 v,短时间后开始减速最后以超低速运动到停止位,减少门框碰撞。根据系统模块设计要求,采用步进电机和行程开关来实现自动开关门功能。其中步进电机用于控制回收门的启闭,按下按键,步进电机启动带动回收门开启;行程开关,又称限位开关,本文选择滚轮式 LX19-001/111 行程开关,负责限制回收门运动位置,确保电机控制的自动门到达一定位置后自动停止。步进电机在选择时需要仔细考虑其步距角以及扭矩,步距角越小平稳性越好。
通过对电机扭矩以及转速公式的分析,采用驱动器型号为 TB6600 的 42BYGH34型步进电机(如图 3.11 连接),体积小,噪音低,具体参数见表

直流电机选择为最大化利用智能垃圾回收箱的容积,回收箱设计了自动压缩功能,通过直流电机驱动的压缩机构对回收物进行压缩处理,达到提高回收箱空间利用率的效果。考虑到压缩机构运动时速度不宜过高,以及不同回收物品压缩时所需的压力不同,选择DT57BL54-240 型无刷直流电机。
电源模块为控制器、传感器模块、电机部分提供稳定电源。不同的模块对于与电源电压的要求也不完全一样,大多数采用 3.3V 电压,部分模块采用 5V 和 12V 电压。系统采用的主控制器、超声波传感器、GPS 定位使用 3.3V 电源电压,称重传感器、烟雾传感器、显示器和扫描模块使用 5V 电压,光幕传感器、通信模块和监控模块使用 12V 电压,电机使用 24V 电压。
所以针对不一样电压需求设计电源电平转换电路。本设计采用市电作为外接电源,使用 AP24N03-Zero AC/DC 模块,将 220V 交流电转为 24V 直流电以供直流电机运行,设计图如图 3.12,其中,FUSE 是限流 1A 的保险丝。
本文主要研究了智能垃圾回收箱控制管理系统硬件,采用STM32单片机作为主控制器,并选择了适用于硬件系统的传感器。论述了智能垃圾回收箱的功能实现方法。在箱门中设计了光幕传感器,与防夹手机构联合发挥作用,提高了垃圾投放的安全性。返回搜狐,查看更加多